As an organisation we’ve always prided ourselves in keeping up with commercial mapping companies’ innovations. That’s why OpenStreetMap is today announcing the launch of Coaster – the first product from Phaethon, the OpenStreetMap driverless car project.

OSMF Coaster (Image cc-by-sa OSVehicle on flickr)
Following in the footsteps of other map-providers-cum-car-manufacturers we recognise that cars without drivers are now within the realms of possibility, and we can develop them as a technology project, iteratively, starting from prototypes. Making use of our accurate road maps, this is a natural area for OpenStreetMap to move into. We expect to see the coaster driverless cars on real roads within the next two years.
The OSMF Coaster
We’re doing this the open source way, and the OpenStreetMap Foundation are working with the folks at OSVehicle who have developed the engine and chassis as an open licensed design while a team in Italy designed the stylish “NIKA” outer shell of this vehicle.
You’ll notice these prototypes feature a steering wheel. This will remain as a safety feature during a testing and data-correction phase, but naturally we’ll be removing the steering wheel when the coaster goes into mass production, as these cars will connect to OpenStreetMap’s data and will no longer need a driver!
How it works
OpenStreetMap is truly a collaborative endeavour, and we intend to build on that tradition by making driving with the OSM car a collaborative experience.
We have always believed that “the perfect is the enemy of the good”. We recognise that there are occasional errors in any map dataset, as Google has repeatedly demonstrated.
Our self-driving car breaks new ground by automatically correcting OpenStreetMap data based on your driving behaviour. Such “passive contributions” have the potential to greatly expand OSM’s contributor base, given that 97% of existing contributors are cyclists.
For example:
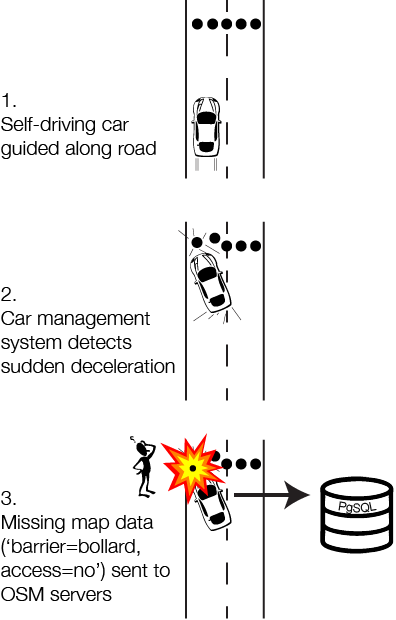
The car’s navigation unit will consume OSM “minutely diffs”. Not only does this ensure that drivers can enjoy up-to-the-minute map data, being able to navigate along new roads instantly without waiting for a monthly update cycle, it provides a virtuous feedback loop for OSM routing. For example, if an OSM contributor inadvertently deletes all the exit routes from a roundabout, such an error will be instantly noticed by any passengers in self-driving cars currently transiting that roundabout.
Ready to go driverless?
You’re probably keen to hop inside an OSMF Coaster. If so, leave a comment below saying “I want one!” and we’ll get in touch about prices and delivery of an early prototype. We will be running off a limited edition batch towards the end of 2016.
In the meantime there are a couple of ways you can help:
Firstly, our tests so far have revealed a few problems related to road lanes. Please review the lanes tagging information and ensure that lanes data is present and correct at the larger roads/junctions in your city. We’ll be refining this kind of data automatically following the process described above, but for safety reasons we recommend you add as much lanes data as you can to OpenStreetMap at this stage.
We expect our cars to be road-certified in various jurisdictions without too much trouble, but if we encounter any obstacles we will be calling upon local OpenStreetMap communities to lobby their governments to speed this process. Keep a look out for campaigns in your area.
Finally please note that the estimated timeframes may slip beyond 2016 for the delivery of prototypes. Also note that the photo at the top is for illustration only, and those ordering an early prototype will be receiving a coaster made with prototyping materials. Thank you for your understanding. We hope the wait will not be too long.
…and happy driving (or not driving we should say!)



