Following our first post on the challenges and opportunities of an indoor-extended OpenStreetMap, we now wish to concentrate on the specifics and provide a proposal for “OpenIndoorMaps”. Before doing this, we provide some use-case scenarios that our proposal addresses.
Use-Case scenarios for OpenIndoorMaps
There are many possibilities or use-case scenarios for indoor maps or services such as routing or navigation. Imagine being a businessman at the airport: after entering the entrance hall you first want to go to the check-in counter and then to a nearby newspaper shop before searching for the lounge and then finally going to the gate. Normally you have to do this “navigation” by yourself, which can be quite a challenging task (especially in huge airports such as Chicago or Beijing).
Another example is the following: you are visiting a huge shopping mall. Unfortunately you do not have much time, thus you need proper guidance inside the mall. Luckily, you have your OSM based indoor routing application on your mobile phone, which means that you can easily locate your desired shop or item and receive proper routing instructions inside the mall. Besides these two use-cases there are plenty of other scenarios such as navigation in hotels (imagine being in Dubai in the Burj Khalifa with more than 100 floors or in the Venetian Resort in Las Vegas with more than 7000 rooms), in universities, in museums, train stations and so on.
As you can see, there are many meaningful examples of why indoor information is so important.
The indoorOSM model proposal
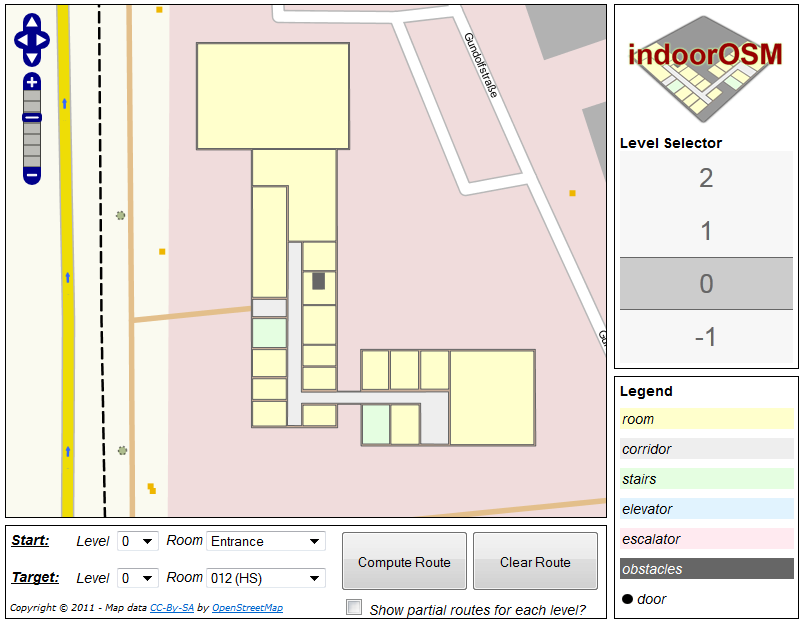
Basically, a building is represented as a feature (technically as a “relation”), whereby an attribute characterises it as building. One of the well known features of OSM is the fact that all kinds of additional building information such as the name or type can be attached to it. Every floor within the building is assigned a floor level while every entrance or exit of the building receives a unique ID in order to create a connection between the outdoor world and the indoor. Each floor is then assigned a corresponding level, (“floor-relation member”) such as level_0, level_1, level_-1 and so on (level_0 always denotes the ground floor).
Each floor of a building (technically each relation-member of the main relation) is again mapped separately, whereby a specific floor level is selected during the editing session.
Different building parts of a floor are mapped as room, hall, corridor, and so on. Each part of the building can contain features such as windows which can be described (tagged) in detail. Vertical connections are mapped as elevators, stairways and so on. A vertical connection can be connected to several levels (e.g. an elevator) or a single level (stairs).
Extend the model to your needs!
A full technical description can be found here: http://wiki.openstreetmap.org/wiki/IndoorOSM. Please do not hesitate to come up with proposals on how to improve and extend the model!
Start mapping a building yourself!
Start mapping a building yourself: Just open the JOSM editor, zoom to the location where the building is and start mapping the level shell as well as the building parts of one level (for example the ground level), and finally combine them in a relation. Afterwards, you can hide this relation (thus all ways will be invisible) and start with the next floor. When you have finished mapping all of the floors, simply create the building relation and add all floor-relations as relation-members.
Look at your result!
Currently, there is no automated integration process of indoor maps into http://indoorosm.uni-hd.de. Therefore, if you have mapped a building, simply send a short notification to m.goetz [at] uni-heidelberg.de (mentioning the relation id of your building) and your map will be integrated as fast as possible. In the long run, a version with automated building integration can also be developed – assuming that there will be more and more building mapped indoors.