In most countries, OpenStreetMap played catch-up with the commercial maps. Indoor Maps are a completely new playing field. So far, none of the commercial providers have gained traction in the Indoor space. It is also an area where OpenStreetMap could take the lead and leave the commercial providers behind straight from the beginning. Wishful thinking? Maybe, maybe not. On the one hand, there is a lack of an Indoor approach for OpenStreetMap. On the other hand, there is no other map data with such attention to detail.
Now there is also a very promising approach to Indoor Maps for OpenStreetMap by the University of Heidelberg and especially Marcus Götz, who is co-author of this post and who will present his approach in a succeeding post. In this post, we want to give a better idea of the opportunities and challenges for “OpenIndoorMaps”.
The opportunity
Germany has reached a leading position with regard to coverage in the OpenStreetMap universe. Around the Reichstag in Berlin, every single tree is mapped. In the Berlin zoo, every single animal compound is mapped. So, what’s next for mappers in those densely mapped areas? An obvious answer is to go indoors.
The indoor space is the last frontier in mapping, and people are seeking and even expecting their well-known outdoor applications (e.g. navigation or local search) being adapted to the Indoor context. However, for transferring applications like openrouteservice.org or osm-wms.de indoors requires details about indoor spaces, and buildings need to be mapped inside. This is where the OSM community can build upon their strength of local knowledge and their attention to detail and as a result beat commercial data providers.
The key difference
Indoor applications require maps on top of each other to deal with floors. Floors need to be connected to each other. Floors need to be considered during capturing and during rendering. Different data is overlaid with each other, thus an appropriate methodology for capturing and visualizing the data is required. Especially a tall building with several floors results in many super-imposed ways when mapping the rooms, corridors and floor shapes in OSM, which makes the OSM mapping some kind of inconvenience (at least for inexperienced mappers). Mapping indoors results in a huge amount of data for a comparable small area.
The challenges
Capturing and rendering floors – How can different floors be mapped in OSM? What is an appropriate visualization of multi-level buildings? How can the OSM map be extended for indoor information?
Privacy protection – Can the indoor space be mapped without limitation or are their additional privacy concerns to be considered?
Indoor Measurement – What technology do people need to capture indoor maps? Which gadgets will take over the role of the GPS receiver for street maps? Is there some kind of publically accessible building information available?
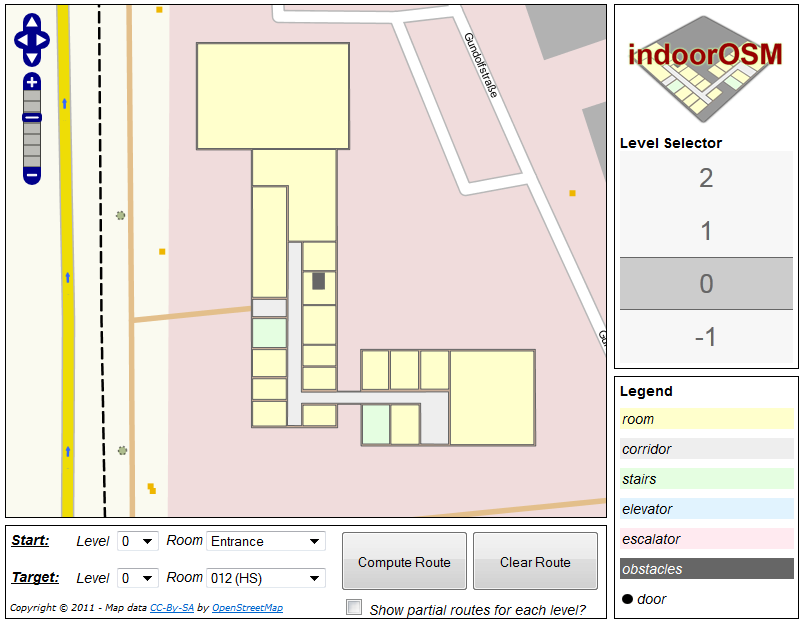
The Indoor Approach by the University of Heidelberg
The Indoor Approach of the University of Heidelberg focuses on dealing with the concept of floors. Thereby, each floor is mapped in great detail, thus the shapes and geometry of rooms are also included. The developed approach builds upon the existing OSM technology with ways and nodes, and combines them with relations to a building. Additional information about doors or semantic information, such as room names, is also included. Essentially, a building can be fully mapped with existing OSM editors (mainly Potlatch or JOSM) and no additional extensions are required. Similar to other applications, the data can then be used for the creation of indoor maps and other applications.
Part 2 of this post will describe the approach in more detail and intends to encourage a discussion to include the community in development of a feasible approach for the OpenStreetMap community.
Interesting stuff – I’d be keen to work it into the county hospital where I work, a huge sprawling site which could obviously benefit.
<a href="http://www.harrywood.co.uk/blog/2011/10/10/sotm-talk/#slide45">Towards the end of my SOTM talk in Denver</a> I spoke about how increased levels of details are becoming a problem for OpenStreetMap. From this point of view the answer to the question <i>"what’s next for mappers in those densely mapped areas?"</i> should probably be…. "Spread out! Don’t go over the top with mapping hyper-detail local to you".Ideas of indoor mapping are bordering on hyper-detailed insanity, but on the other hand I do think we should aim to map individual shops and amenities inside shopping malls, so that our dataset can at least support "find my nearest shoe shop" type queries. And something as simple as adding internal shops as nodes, does indeed prompt some of the question your describe. See also <a href="http://wiki.openstreetmap.org/wiki/Talk:Tag:shop%3Dmall">shop=mall Talk page</a>.But is there some way we can collectively agree not to go over the top with detail level?
I would love to see OpenStreetMap or, in this case, OpenIndoorMaps get the lead on the market. There is an effort from Google to do indoor mapping of main buildings and have it available on Android devices.I think OpenStreetMap/OpenIndoorMaps can have an important lead if the methods to map the indoors are well defined and we come up with good visualization options and, of course, if this catches on, if many buildings start to get mapped, specially public-interest buildings (museums, malls, hospitals, universities, public administration…)
It’s great to be thinking about indoor maps as I’ve sort of glossed over mapping of shopping malls (just mapping the building outline and nodes at entrances of the anchor stores). Note that Bing Maps have started to do this already…http://binged.it/xnvvRV
Harry, the completely open "JFDI" approach we have at the moment makes it pretty unlikely that any "collective agreement" _not_ to map something will get very far.So long as this is the case, the only option is to make sure our tools can handle this level of data, and to ensure we offer ways to contribute that don’t require the user to deal with the full raw data. For example, once you’ve got to the point where you’re mapping trees and internal building layouts you can probably facilitate most contributions with something likethe opentoiletmap/wheelmap interface rather than dumping the user in potlatch with all the data showing up. Experts can make the other occasional major changes to road and building geometry.
I really like what has been done by the EPFL in Switzerland.
There have been many domains of interest discussing indoor location services and related mapping requirements. The availability of indoor data is critical and the activity suggested in this posting would be valuable. I would like to make this community aware of a new OGC standards initiative titled InDoorGML. The important aspect of this work is working toward consensus agreement on a conceptual model. There is a draft conceptual model already developed and available on the OGC website. Floor plans are only a small part (and the easy part) of the conceptual model. Other aspects to consider are zones (security, communications, etc) as well as the semantics of the indoor environment. The draft charter for the new InDoorGML activity is here:https://portal.opengeospatial.org/files/?artifact_id=47562&version=1. From that document:This SWG aims to provide a common schema framework for interoperability between indoor navigation applications, which cover a wide spectrum of application areas such as indoor LBS, indoor web map services, indoor emergency control, guiding services for visually handicapped persons in indoor space, and indoor robotics. Several commercial services for indoor spatial information have been recently launched such as Google Maps and Bing Indoor Maps. In order to meet the market demands from these application areas, we need indoor navigation information as an essential component. There are also strong demands of indoor navigation information from other standardization organizations including ISO/TC204 and IEEE RAS to extend existing standards to cover indoor space as well as outdoor space in a seamless way. However, developing indoor navigation information is difficult and expensive due to the complexity of indoor space. The IndoorGML candidate standard will provide a framework of interoperability betweensystems and services for sharing indoor navigation information.Feel free to comment!Thanks!Carl
@Carl: OpenStreetMap deliberately chose not ti be conform with any standard. Flexilbility is considereed more important than compatbility. OpenStreetMap is build on upmost flexiblity so that the community can drive the progress rather than any representatives in standardization committee.
I’ve created an application that does indoor mapping. It can map down to a pencil on desk if you want it to, but I would agree with the comment above about the level of detail. At some point you begin to collect useless data. Mapping of people and significant items are of value but a stapler or a pencil would be a waste.Also, the idea of the public mapping private building interiors is going to present interesting challenges. The entity in control of the facility is going to want control of the content and in many cases may even want to keep that detail private. Even in spaces that are open to the public they will almost certainly want to be in control of the data presented. So who will control the data?I have demo’s available at: http://porchcode.blogspot.com/ for anyone who is interested.