Die OpenStreetMap Foundation war schon immer stolz auf ihre große Community und deren Möglichkeiten, mit den kommerziellen Kartenanbietern mitzuhalten. Daher ist es uns heute eine besondere Freude, den Start von Coaster, dem selbstfahrenden OpenStreetMap-Auto bekannt zu geben.

OSMF Coaster (Image cc-by-sa OSVehicle on flickr)
Betrachtet man die Nachrichten anderer großer Kartenanbieter und Automobilhersteller, fällt es nicht schwer zu erkennen, dass das selbstfahrende Auto bald keine Zukunft mehr sein wird. Da aber der Erfolg solcher Projekte stets auf hochgenauen Kartendaten beruht, erscheint es nur logisch, die Datenbasis von OpenStreetMap für ein solches Projekt zu verwenden um iterativ von einem Prototypen zu einem serienreifen selbstfahrenden OpenStreetMap-Auto innerhalb der nächsten zwei Jahre zu gelangen.
Der OSMF-Coaster
Auch ein solches Projekt bleibt natürlich dem Gedanken von OpenSource treu. Daher arbeitet die OpenStreetMap Foundation mit den großartigen Ingenieuren von OSVehicle zusammen, die ihre Motoren und das Fahrgestell unter einer freien Lizenz anbieten, sowie einem Team aus Italien, das das stylische “NIKA”-Gehäuse des Fahrzeugs entworfen hat.
Wie man unschwer auf den Bildern erkennen kann, werden die bisherigen Prototypen noch mit einem Lenkrad ausgerüstet, das in der Testphase als notwendiges Sicherheitsinstrument vorhanden sein muss da durchaus noch Lücken und kleinere Fehler in den OpenStreetMap-Daten vorhanden sein können. In der Serienversion des Coasters soll das Lenkrad aber entfernt werden, da die direkte Verbindung zum OpenStreetMap-Datencenter für immer hoch aktuelle und hoch genaue Daten sorgt und somit ein Eingreifen eines Passagiers überflüssig macht.
Wie funktioniert’s?
OpenStreetMap verfolgte seit jeher den sogenannten Crowdsourcing-Ansatz und das soll sich natürlich auch mit unserem OpenStreetMap-Auto nicht ändern.
Wir waren immer der Ansicht “Perfektion ist des Guten Feind” und so müssen wir uns natürlich auch gelegentlichen Fehlern stellen. Das ist aber auch bei anderen Kartenanbietern der Fall, wie uns auch Google wiederholt bewiesen hat.
Trotzdem wollen wir Fehler vermeiden und haben uns daher ein bahnbrechendes neues Konzept überlegt: Zu den gewohnten manuellen Updates werden die OpenStreetMap-Daten automatisch durch das Fahrverhalten korrigiert. Diese “passiven Beiträge” ermöglichen es, unsere Benutzerschaft nochmals stark zu vergrößern, da bislang 97% unserer Benutzer Fahrradfahrer sind.
Zum Beispiel:
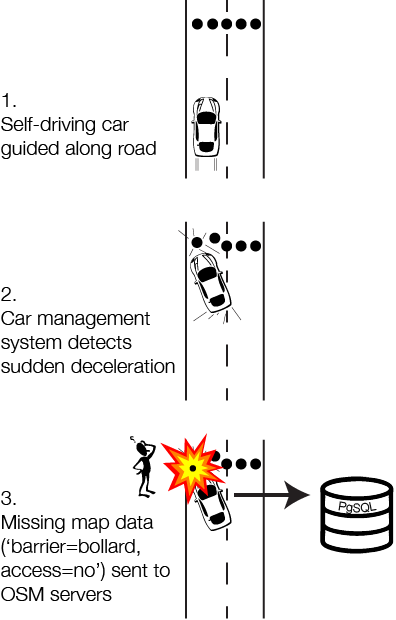
Das Navigationsgerät im Auto holt sich die minütlichen Updates (“minutely diffs”) von OpenStreetMap und ermöglicht so nicht nur hoch aktuelle Daten sondern erlaubt es damit auch, sofort auf neuen Straßen fahren zu können ohne die typischen Werkstattzyklen für Software- und Datenupdates abwarten zu müssen. Es bietet daher sehr schnelle Rückmeldungen für das Routing von OSM. Sollte z.B. ein OSM-Mapper versehentlich alle Anschlussstraßen an einen Kreisverkehr löschen, würde ein Passagier eines selbstfahrenden Autos in einem solchen Kreisverkehr diesen Fehler unmittelbar bemerken.
Bereit mitzumachen?
Wir suchen noch immer Freiwillige, die helfen, den Prototypen des OSMF-Coasters zu testen. Wir werden daher alle Kommentare mit “Ich will einen Coaster!” berücksichtigen und über Preise und genauere Liefertermine informieren. Vorausgesetzt der Interessent verfügt über einen gültigen Führerschein, der für die Testphase noch nötig sein wird. Wir hoffen bereits Ende 2016 eine erste limitierte Auflage an Testfahrzeugen bereit zu stellen.
Bis es soweit ist gibt es aber schon jetzt Möglichkeiten uns zu unterstützen:
Unsere bisherigen Tests haben kleinere Probleme aufgezeigt, die sich durch fehlerhaftes oder fehlendes Spurmapping ergeben. Es wäre daher hilfreich, wenn das Tagging von Spurinformationen in OpenStreetMap vor allem für größere Straßen und Kreuzungen geprüft werden würde. Die Daten werden natürlich später automatisiert verbessert (siehe oben), aber aus Sicherheitserwägungen wären initiale Daten für die erste Testphase nützlich.
Zudem gehen wir zwar davon aus, dass wir ohne größere Schwierigkeiten eine Straßenzulassung für unsere Fahrzeuge in praktisch allen Ländern erhalten werden, hoffen aber im Falle von Problemen mit den Behörden auf euch, die lokalen Communities: Nur in dem ihr uns helft können wir schnell und unkompliziert eventuell vorhandene juristische Fallstricke beseitigen und lösen.
Es sei weiter noch darauf hingewiesen, dass wir den Liefertermin für unsere Prototypen nicht garantieren können. Zudem sollte beachtet werden, dass das eingangs gezeigte Foto der Illustration dient und die ersten Prototypen noch mit anderen Materialien geliefert werden. Vielen Dank für euer Verständnis, wir hoffen alle, dass wir nicht zu lange warten müssen.
… viel Freude am Fahren (bzw. eigentlich am nicht Fahren!)



